Sean Wu
I’m a Master’s student at ETH Zurich, specializing in computer vision and machine learning. As of Summer 2025, I’m also a research intern at Apple. At ETH, I’ve worked on neural rendering with Dr. Christos Sakaridis and Prof. Luc Van Gool at the ETH Computer Vision Lab. Previously, I studied Engineering Science at the University of Toronto, where I worked on perception for autonomous driving with Prof. Jonathan Kelly and the aUToronto self-driving car team.
Outside of research, I dabble in learning languages, running, and hiking.
Research
I’m broadly interested in the intersection of vision + graphics, particularly in 3D scene understanding and generation. My recent work focuses on neural rendering, multi-sensor perception, and visual inductive biases. I especially enjoy: (1) application-driven problems (e.g. photorealistic digital humans and autonomous driving) and (2) leveraging theory (e.g physics, graphics, optimization, etc) to guide data-driven learning.
* denotes equal contribution

Sean Wu, Shamik Basu, Tim Broedermann, Luc Van Gool, Christos Sakaridis
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025
paper / project page / code
Physics-based priors help constrain the ill-posed inverse rendering problem, allowing neural fields to more accurately estimate geometry, lighting, and BRDF-based materials.
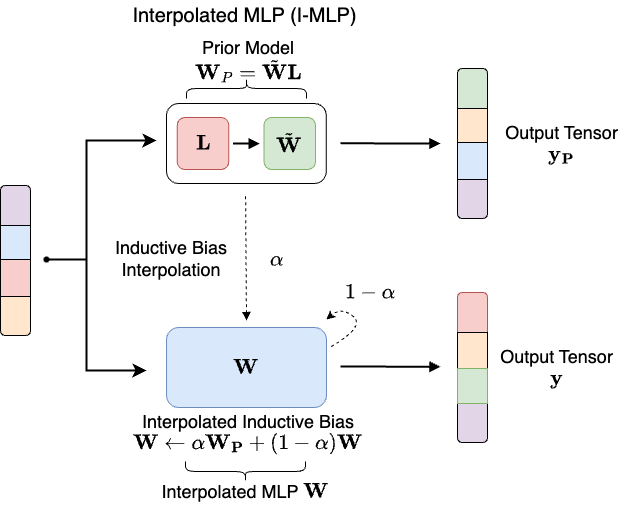
Sean Wu*, Jordan Hong*, Keyu Bai*, Gregor Bachmann
ICML Workshop: High-dimensional Learning Dynamics, 2024
paper
We empirically study visual inductive biases by interpolating MLP weights with structured weight matrices (CNNs, MLP-Mixers) and measuring test performance.
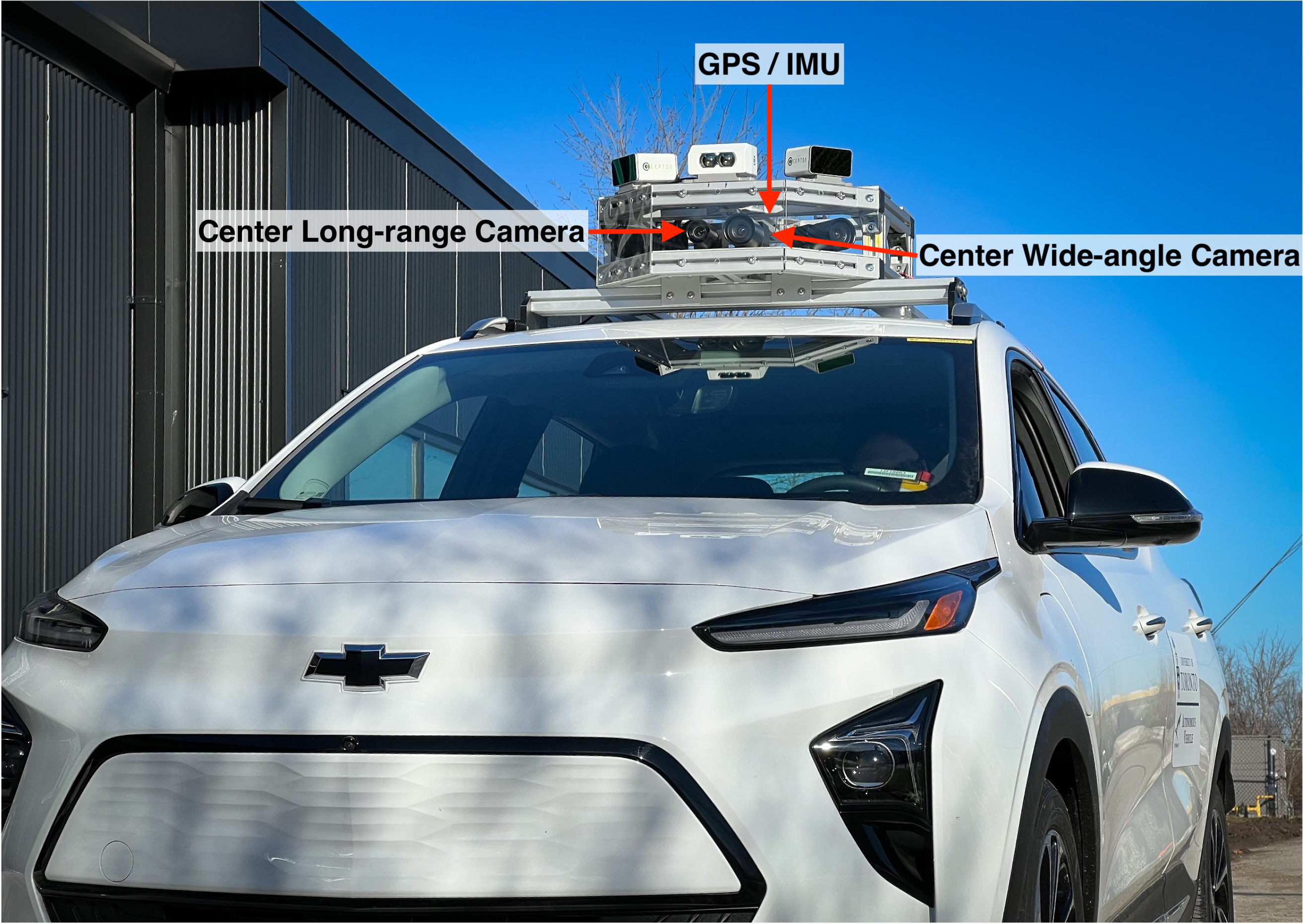
Sean Wu, Nicole Amenta, Jiachen Zhou, Sandro Papais, Jonathan Kelly
Conference on Robots and Vision, 2023
paper
Multiple cameras + CNNs + HD map + HMM filtering enable robust real-time traffic light perception for autonomous vehicles.
Thank you to Jon Barron for open-sourcing his website.